
CoFly nominated as an example of projects!
Multimodal Data Fusion and Analytics Group - Friday, August 1, 2025Our nationally funded project, CoFLy (Cognitive Operations of micro-Flying vehicles),which focuses on developing innovative operations for Micro Aerial Vehicle (MAV) systems, has been labelled as a “Successive Example” by the Competitiveness, Entrepreneurship & Innovation Committee.
The main objective of the CoFly project was to insert pioneering functionalities in Micro Aerial Vehicle (MAV) systems, aiming at reducing the operational cost as well as to incorporate intelligent modules assisting non-expert users in proper manipulation. To this end and far beyond the simple remote control of MAVs, CoFly integrates advanced cognitive capabilities, enabling autonomous navigation, perception, decision-making, and adaptability to new data.
 Picture 1. Field testing by the CoFly consortium team
Picture 1. Field testing by the CoFly consortium team
The project has proven its impact on the precision agriculture domain. Field trials conducted over two crop seasons in cotton fields in the Larissa region validated the system’s ability to navigate through complex environments and support farmers with tasks such as plant health monitoring and weed detection. Efficient localization and mapping techniques, semantic representation and recognition abilities are integrated in the platform to improve the robot’s cognitive capabilities for precise robot-user and robot-environment interactions, resulting in an optimal decision-making tool for the end-user.
M4D group is responsible for developing computer vision algorithms and AI models that served as the main backbone of the CoFly platform’s functionalities.
Additionally, participated in project coordination together with CERTH’s fellow team, ConvCao.
CoFly platform is available to public and to research community: https://github.com/CoFly-Project.
You can find the full article here: https://kalespraktikes.antagonistikotita.gr/cofly-protoporiaka-systimata-mikron-enaerion-ochimaton/
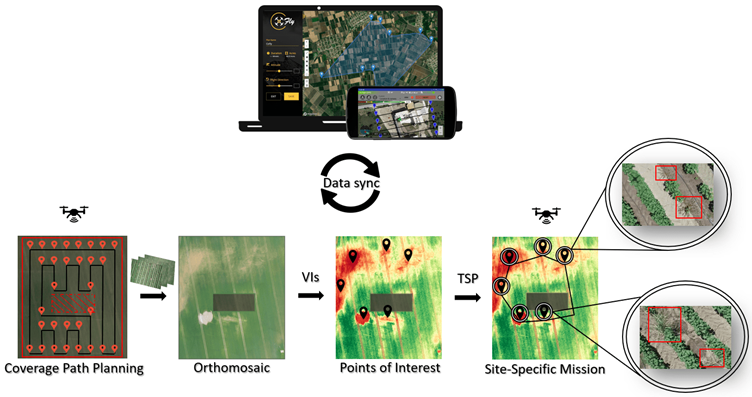 Picture 2. Overview of the CoFly platform functionalities
Picture 2. Overview of the CoFly platform functionalities
 Picture 3. UAV equipment configuration during field experiments
Picture 3. UAV equipment configuration during field experiments